Exoesqueletos robóticos que ayudan al cerebro a caminar
Equipos del CSIC llevan casi dos décadas investigando en neurorrehabilitación de la marcha, un campo a caballo entre la investigación y la realidad clínica de las enfermedades neurológicas
Equipos del CSIC llevan casi dos décadas investigando en neurorrehabilitación de la marcha, un campo a caballo entre la investigación y la realidad clínica de las enfermedades neurológicas
Cuando un niño padece parálisis cerebral, el daño que ha sufrido desemboca en enormes dificultades para controlar sus músculos. Depende de la gravedad de las lesiones cerebrales que se hayan producido, podrá llegar a ponerse de pie y andar por sí solo mejor o peor o con ayuda de medios físicos, pero las consecuencias sobre su desarrollo cognitivo y motor requerirán de una rehabilitación multidisciplinar, con la implicación de traumatólogos, psicopedagogos, terapeutas ocupacionales y fisioterapeutas.
La parálisis cerebral infantil, la causa de discapacidad motora en niños más frecuente, afecta a casi uno de cada 500 nacidos en España, según datos de la Confederación Española de Asociaciones de Atención a las Personas con Parálisis Cerebral (ASPACE). No solo modifica la respuesta motora, sino que además suele ir acompañada de epilepsia, alteraciones visuales, auditivas e intelectuales y dificultades de aprendizaje. En el 75% de los casos, la espasticidad (un trastorno que implica un aumento anormal del tono muscular) es el síntoma clínico más frecuente y el principal motivo de alteración de la marcha.
El cerebro puede sufrir estas lesiones durante la gestación, el parto o los tres primeros años de vida del niño debido a diversas causas, como infecciones bacterianas o falta de oxígeno durante el nacimiento. El daño se produce en momentos en que su sistema nervioso central está madurando, lo que provoca que los impulsos innatos de ponerse de pie y empezar a caminar no ocurran de manera adecuada. Su cerebro no es, por tanto, capaz de establecer las conexiones necesarias para controlar de forma correcta el movimiento, la postura y el equilibrio.
“¿Y si hacemos que estos niños pasen por la experiencia de empezar a caminar y evaluamos el potencial que tiene la marcha en su desarrollo cognitivo?”, se pregunta Eduardo Rocon, líder del Grupo de Ingeniería Neural y Cognitiva del CSIC en el Centro de Automática Robótica (CAR, CSIC-UPM), en Arganda del Rey (Madrid), mientras muestra y explica la finalidad de su último prototipo: un exoesqueleto flexible pensado para la rehabilitación de miembros inferiores en niños pequeños, de entre uno y tres años de edad, con parálisis cerebral infantil. Esta especie de aparato de musculación portátil consiste en una plataforma metálica unida a los pies mediante cables y a la cadera y pelvis mediante un dispositivo vestible en forma de calzoncillo. Varios motores ejercen la fuerza necesaria para que el paciente comience a caminar.
En el último siglo, la irrupción de las tecnologías capaces de compensar los trastornos motores y recuperar funciones olvidadas o no adquiridas por el sistema nervioso ha revolucionado el modo de aplicar los tratamientos. Destacan la neurorrobótica, basada en exoesqueletos vestibles que se adhieren al cuerpo, la neuroprotésica, que tiene como objetivo la estimulación de los músculos mediante niveles bajos de corriente, y la realidad virtual, empleada para facilitar el aprendizaje de nuevos dispositivos.
El Grupo de Ingeniería Neural y Cognitiva del CAR lleva más de 15 años trabajando en exoesqueletos que sirven de complemento a las terapias tradicionales de neurorrehabilitación, un campo dirigido al tratamiento de personas que han sufrido un trastorno neurológico y son incapaces de realizar actividades cotidianas como caminar, desplazarse, alimentarse o vestirse. Estos dispositivos muestran beneficios para los pacientes porque su implicación es activa durante la terapia.
“Sabemos por la literatura científica que el hecho de empezar a caminar por primera vez o volver a hacerlo tras una lesión medular o un accidente cerebrovascular estimula enormemente el desarrollo cognitivo de los pacientes. Con este prototipo queremos validar esta hipótesis y estudiar si existe una retroalimentación entre el control motor y el desarrollo cognitivo”, señala el investigador del CSIC.
Un exoesqueleto para bebés
La mejor cualidad de Discover2Walk, que es como Rocon y su equipo han bautizado a este robot para bebés, es su diseño flexible, adaptable a varios pesos y alturas. Cuando sea probado en un hospital dentro de unos meses, médicos y fisioterapeutas podrán evaluar si es útil para complementar la rehabilitación de sus pacientes. “Además, incorpora sensores que miden y programan la fuerza que se aplica sobre el sistema. Esta utilidad permite hacer un seguimiento más preciso de la evolución del paciente y modificar su tratamiento”, señala el científico del CSIC.
En 2010, este equipo decidió orientar su conocimiento en automatización hacia el desarrollo de ayudas técnicas a la discapacidad. Ese mismo año presentaron una neuroprótesis capaz de compensar e, incluso, eliminar los temblores provocados por el párkinson. Más tarde, en 2015, sus avances se materializaron en la creación de la empresa spin-off del CSIC Werium Solutions, la cual tiene transferidas algunas de las tecnologías que han surgido en sus laboratorios.
Neurorrehabilitación personalizada
Ese es el caso del CP Walker 2.0, un exoesqueleto que promueve una terapia activa para la corrección de la postura durante la marcha en niños con parálisis cerebral. Este robot, pensado para ser empleado con pacientes más mayores que el Discover2Walk, permite aplicar estrategias más personalizadas. Tras ser validada en 2019 con diez pacientes en el Hospital Niño Jesús de Madrid, la eficacia de este exoesqueleto está siendo evaluada en un estudio multicentro con cerca de 50 pacientes en el hospital Shirley Ryan Ability Lab de Chicago (Estados Unidos).
“Los robots son máquinas apropiadas para hacer movimientos repetitivos de forma muy intensa y siempre se ha intentado aprovechar esta capacidad para recuperar la movilidad”, detalla Rocon, tras asegurar que no habría podido incorporar sus desarrollos a la práctica clínica sin la visión y aportaciones de los diferentes profesionales implicados en neurorrehabilitación.
Un entorno de prueba para exoesqueletos
De la misma opinión es Diego Torricelli, investigador del CSIC en el Instituto Cajal (IC-CSIC) y coordinador del proyecto europeo Eurobench, que tiene como finalidad la creación del primer centro europeo de ensayo, estandarización e investigación en exoesqueletos robóticos para rehabilitación. “Aunque los ingenieros conocemos la problemática, nuestras tecnologías no servirían de nada si no consultásemos a los médicos, que nos dicen por qué es necesario o no un determinado dispositivo. Nuestra labor también es clave porque aportamos datos sobre la marcha de los que no disponen”, señala Torricelli.
Gracias a la colaboración de más de 80 empresas, universidades y centros de investigación de 15 países europeos, financiadas por el programa europeo Horizonte 2020, Eurobench seleccionó el Center for Clinical Neuroscience del Hospital Los Madroños, en Brunete (Madrid), como centro de pruebas. “El objetivo es disponer de un entorno de prueba para exoesqueletos que replican la vida diaria. Empresas e investigadores del sector contarán con un espacio idóneo para probar el rendimiento de sus tecnologías en cualquier fase de desarrollo”, detalla Torricelli.
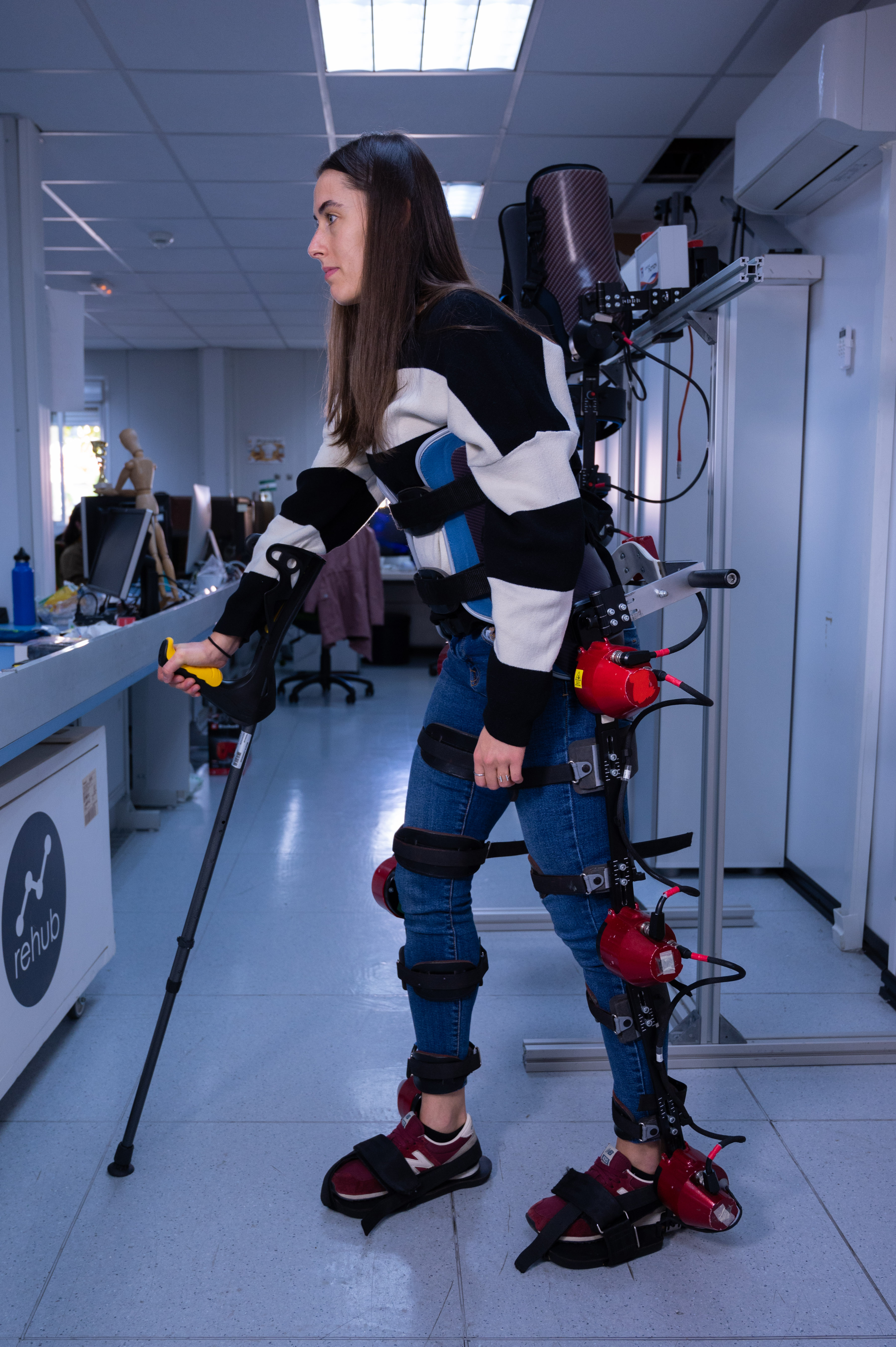
Uno de los exoesqueletos que serán testeados en este centro es el Exo-H3 de Technaid, una empresa de base tecnológica surgida en 2004 en el seno del Grupo de Neurorrehabilitación del CSIC. Este robot vestible, que se ajusta a los pies, piernas y cadera, puede emular de manera completa la marcha y asistir a personas que hayan perdido parcialmente la capacidad de caminar tras haber sufrido un accidente cerebrovascular o una lesión medular parcial.
Una pierna robótica maniquí
El laboratorio de Torricelli en el Cajal ha visto nacer también un prototipo que simula el movimiento de la rodilla. Este robot, integrado en el proyecto Exosafe, servirá para que los científicos estudien la interacción de los exoesqueletos con los pacientes antes de comenzar una terapia neurorrehabilitadora.
“Las bolitas blancas de la pierna robótica son sensores de interacción física de fuerza, cinemática y movimientos”, explica Stefano Massardi, investigador posdoctoral. Su compañero David Rodríguez, estudiante de posgrado, añade: “Es un dispositivo que nos permite hacer muchas pruebas replicables y eliminar la variabilidad. En un futuro nuestra idea es diseñar un robot maniquí que replique el cuerpo entero. El proyecto servirá para establecer protocolos e indicadores de seguridad”.
Robots híbridos
Juan Camilo Moreno, líder del Grupo de Neurorrehabilitación del IC-CSIC junto a Torricelli, sabe bien cómo es trasladar estas tecnologías al entorno clínico. Uno de sus últimos desarrollos es el dispositivo Tailor, diseñado en colaboración con el Hospital Nacional de Parapléjicos de Toledo, la Universidad Politécnica de Cataluña, la Universidad Rey Juan Carlos I y el Instituto Guttman. Se trata de un robot híbrido de entrenamiento de la marcha patológica que combina sistemas robóticos, que aportan fuerza, con una neuroprótesis que activa artificialmente los músculos de las extremidades inferiores. El punto fuerte de Tailor, que ya ha sido probado en pacientes con lesión medular e ictus, es su diseño modular.
“El rehabilitador puede configurar los módulos para que el robot se adapte al paciente y active más unos músculos que otros durante la marcha asistida”, destaca el investigador del CSIC. Y concluye: “Los pacientes que han probado este prototipo se han mostrado satisfechos con la capacidad de configuración y adaptación del sistema. Ahora lo que queremos es seguir trabajando para optimizar la integración de todas estas tecnologías y aproximarlas más al mercado”.
Alda Ólafsson
Noticias relacionadas
El Consejo Superior de Investigaciones Científicas (CSIC), organismo…
Cada año, miles de personas padecen gripe o síntomas similares sin acudir…
El yacimiento de Casas del Turuñuelo, en Guareña (Badajoz), nos tiene acostumbrados a grandes…